12.4. 指令调度
12.4.1. 指令流水线和流水线冲突
指令流水线把一条指令的执行过程拆分为若干阶段,使多条指令的不同阶段能够在同一周期并行推进,从而更充分地利用 CPU 核内功能部件,提高指令吞吐量。
以经典5级流水线为例,指令执行可划分为取指、读寄存器、执行、访问内存和写回5个阶段,如图10-1所示。
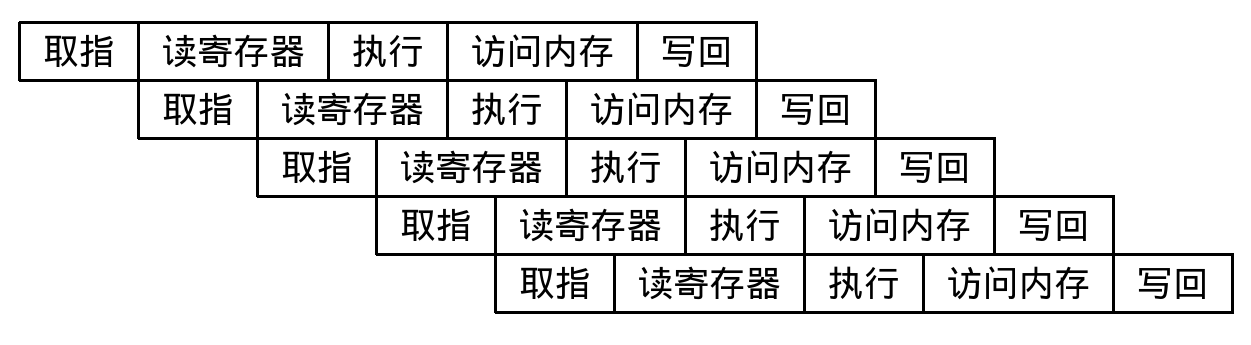
每个流水阶段通常占用固定时间,一般为一个处理器时钟周期。取指阶段根据程序计数器(PC)访问指令缓存和指令 TLB,将一条或多条指令取入指令存储器。读寄存器阶段读取源寄存器内容。执行阶段完成算术或逻辑运算。访问内存阶段负责读写数据缓存中的内存变量。写回阶段则把运算结果写回寄存器堆。
当第一条指令进入读寄存器阶段时,第二条指令可以同时进入取指阶段;当第二条指令读寄存器时,第三条指令又可以开始取指,后续指令依次进入流水线。因此,在同一个时钟周期内,多条指令可分别位于不同流水级。流水线技术能够提升指令吞吐量,并缩短程序整体执行时间。龙芯3号处理器的基本流水线包括 PC、取指、预译码、译码1、译码2、寄存器重命名、调度、发射、读寄存器、执行、写回和提交,共12级。
多数指令之间并非完全独立,常见相关性包括数据相关、控制相关和结构相关。若后一条指令需要使用前一条指令的结果,必须等待前一条指令完成,则称为数据相关。若当前指令是条件转移指令,后续指令地址取决于该转移结果,则称为控制相关。若两条指令竞争同一个功能部件,例如都需要使用 ALU 执行整数运算,或都需要使用 FPU 执行浮点运算,则称为结构相关。
这些相关性会引起流水线阻塞。以数据相关为例,假设第 N 条指令把结果写入 r1,第 N+1 条指令又要读取 r1 参与计算。在5级流水线中,第 N 条指令直到第五阶段才写回 r1,而第 N+1 条指令在第二阶段就要读取 r1。如果不采取措施,后一条指令可能读到旧值,导致结果错误。最直接的处理方法是等待,即让第 N+1 条指令在读寄存器阶段暂停3拍后再读取新值,但这种停顿会降低流水线效率。
流水线前递技术可以缓解数据相关问题。采用前递后,后续指令不必等前序指令把结果写回寄存器,就能提前获得计算结果。例如:
add.d r5, r4, r3
sub.d r6, r5, r3
这里第二条 sub.d 需要使用第一条 add.d 的结果,因此二者存在数据相关。使用前递后,sub.d 不必等待 add.d 完成写回;只要 r4 与 r3 的加法结果已经产生,就可以直接传递给 sub.d 的执行阶段。
不过,对于需要多拍完成的操作,前递的效果有限。前递通常只能减少1~2拍等待,而下面这类序列仍可能产生较长停顿:
load r1, addr
addi r1,r1,#2
由于 load 指令可能执行多拍,且耗时受缓存命中情况影响,前递很难完全消除等待。后文将介绍如何通过静态指令调度,把存在相关性的指令适当隔开,以降低流水线冲突。
控制相关和结构相关同样会造成停顿。对于控制相关,在条件转移指令完成之前,处理器无法确定下一条指令地址,因此不能可靠地把后续指令送入流水线,只能等待转移结果。现代处理器通常使用分支预测减少这类阻塞。结构相关的根源则是硬件资源有限。例如处理器只有一个乘法部件时,当前乘法指令尚未完成,后续乘法指令就只能等待。
12.4.2. 指令调度
指令调度是在不改变程序结果的前提下,重新安排指令顺序,以减少由指令相关引发的流水线阻塞,从而提升执行效率。调度方式可分为静态调度和动态调度。动态调度由硬件在运行时完成;静态调度则由汇编程序员或编译器在程序执行前完成指令重排。
进行静态调度前,需要了解处理器内部通常包含多个功能部件,不同指令会使用不同部件,执行拍数也不相同。例如,算术、逻辑和转移指令一般在定点 ALU 中执行,通常1拍完成;浮点运算在浮点 ALU 中执行,常需2~3拍;浮点乘除法至少需要5~6拍;访存指令由访存部件处理,耗时与 Cache 命中情况密切相关,通常也需要多拍。
假设存在数据相关的浮点加载指令与浮点运算指令之间需要间隔1拍,记为指令延迟为1;两条存在数据相关的浮点运算指令之间需要间隔2拍,记为指令延迟为2;其他存在数据相关的整型运算指令不产生额外延迟。若要实现数组中每个元素与一个定值相加,其指令序列及延迟信息如下:
i1 Loop: fld.f fa0, 0(r1)
| 1
i2 fadd.f fa2, fa0, fa1
| 2
i3 fsd.f fa2, 0(r1)
i4 addi.w r1, r1, -4
i5 bnez r1, Loop
这是调度前的指令序列,共5条指令(i1~i5)。i1 和 i2 之间的1表示两者存在数据依赖,且 i1 的延迟为1。i2 和 i3 之间也存在数据依赖,延迟为2。i4 与 i5 虽然存在数据依赖,但无额外延迟。按此顺序执行完5条指令需要8拍。通过调整指令顺序,可以利用空闲拍数减少等待,优化后如下:
i1 Loop: fld.f fa0, 0(r1)
| 1
i2 fadd.f fa2, fa0, fa1
i4 addi.w r1, r1, -4
i3 fsd.f fa2, 4(r1)
i5 bnez r1, Loop
优化后的序列交换了 i3 和 i4 的位置,并把 i3 的存储地址由 0(r1) 改为 4(r1),以保持程序语义不变。此时执行完5条指令只需6拍,比调度前减少2拍。
总体来看,软件对控制相关的优化空间有限;但对于数据相关和结构相关,可以通过分析指令延迟和资源使用情况,合理安排指令顺序,提高程序执行效率。